
產(chǎn)品簡介PRODUCT DESCRIPTION

機器人倒立擺控制開源平臺
聯(lián)系電話:13720126958 / 13387619634產(chǎn)品特色
PRODUCT FEATURES
1、Matlab/Simulink下建立的動態(tài)系統(tǒng)數(shù)學(xué)模型應(yīng)用于實時仿真、算法測試,便于全流程控制和局部算法驗證。
2、高度集成的機器人編譯環(huán)境保證了模型的可靠性、準確度及更小的仿真步長,提高了模型運算速度和控制精度。
3、涵蓋機器人基礎(chǔ)理論和高級控制算法庫,集成多種總線通訊模塊,建立運動學(xué)、動力學(xué)模型,兼具視覺、力覺等處理能力。
4、提供多層次開發(fā)接口,針對開發(fā)的深度不同,滿足不同層次的開發(fā)需求,深度開放,滿足定制化開發(fā)。
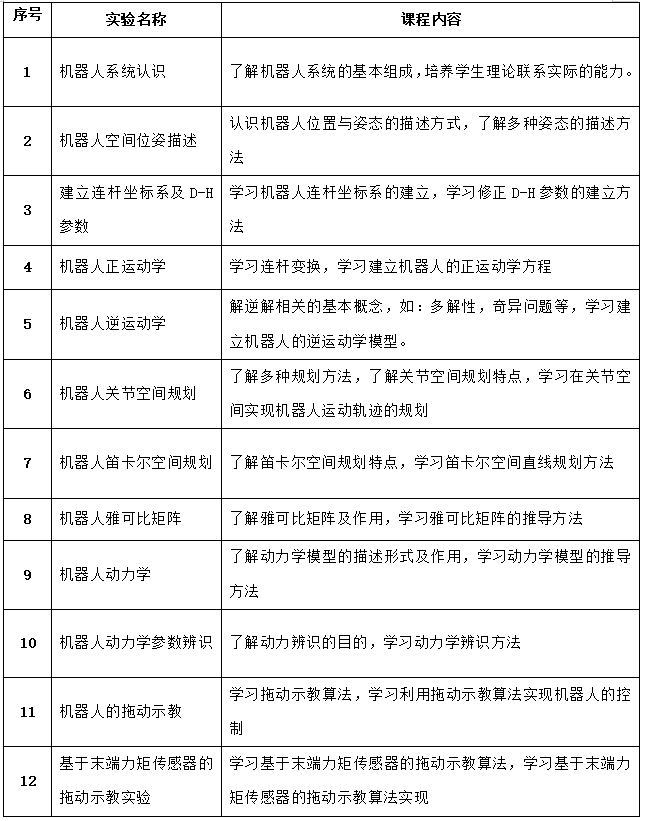
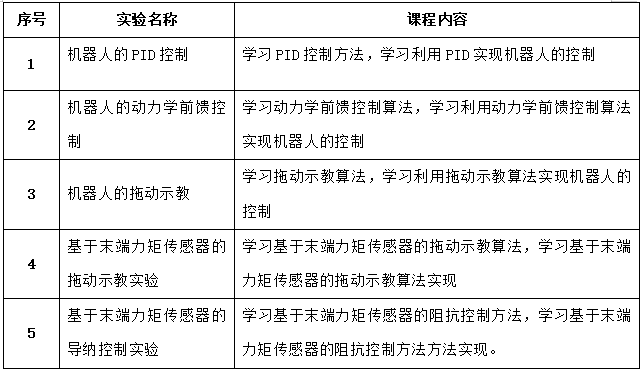
實驗內(nèi)容
PRODUCT FEATURES
基礎(chǔ)實驗:
高級實驗:
配置清單
CONFIGURATION LIST

說明:1、機器人倒立擺可根據(jù)用戶實際需求進行調(diào)整更換;
2、可根據(jù)用戶實際需求定制化搭建應(yīng)用場景;
相關(guān)產(chǎn)品推薦RELATED PRODUCTS








客戶服務(wù)電話:
027-87018711
 掃描二維碼關(guān)注我們
掃描二維碼關(guān)注我們
聯(lián)系電話:李經(jīng)理 13720126958 陳經(jīng)理 13387619634 郵箱:wheckert@126.com
公司地址:湖北省武漢東湖新技術(shù)開發(fā)區(qū)關(guān)東街道湯遜湖北路36號武漢理工大科技園新能源研發(fā)基地2棟08層801
版權(quán)所有 ©2019-2050 武漢艾克特科技有限公司 鄂ICP備19030040號-1